¿Por qué Pentax es la mejor marca de reflex de la historia? Este modelo solo cuesta 644€ y es gama proconsumer. Se trata de la vieja K-5 y no de ninguna de sus revisiones (es un modelo de mas de 2 años y sus datos le mojan la oreja a cualquier Canon o Nikon actuales de precios similares)
-16MPx
-Cuerpo sellado
-Estabilizador de imagen integrado en el cuerpo
-HDR integrado en la camara
-ISO 80-51200 en manual
-FullHD a 25fps
-7fps
-1/8000 tiempo de obturación
Y lo mejor de todo..
Para los que quieran cámaras de gama intermedia, están las K-30 y K-50 de la misma calidad y especificaciones casi calcadas. Para principiantes tenemos ñas k-r y nuevas k-500 (esta prima hermana de las K-50 pero sin cuerpo sellado ni de magnesio pero solo 499 euros en kit con 18-50)

domingo, 30 de junio de 2013
domingo, 26 de mayo de 2013

Hace poco se acaba de inaugurar la página web de una aplicación que seguro será de interés para los usuarios de móviles con SO Android y que sean unos apasionados del deporte al aire libre. Se trata de un programa que ayuda a los jugadores de golf a mejorar su juego, mediante una serie de ayudas sobre el propio campo gracias al uso del GPS.
La aplicación no se encuentra aún publicada en el google play, pero promete hacerlo en poco tiempo. Se encuentran registrados todos los campos de golf de España, y pinta sublime. Es un concepto nuevo que los buenos aficionados al golf agradecerán.
----
A few days ago was launched the website about an app that will be very interesting for android movile device users and outdoor sports enthusiasts. It's a software that will help golf players to improve their skills thanks to their device's GPS and other interesting features.
The app is not published in Google Play yet, but it will be very soon. All spanish golf courses are included and looks great. It's a new concept that amateur golfers will appreciate very much.
www.scaddie.com
viernes, 5 de abril de 2013
Panorámica en alta resolución de Marte
Esta imagen de 360º que bien podría haber sido sacada por un Nexus 4 o un LG Optimus G, pertenece a la Curiosity Rover en Marte.
Esperemos que la próxima foto obtenida por un engendro mecánico de forma remota, la hayamos obtenido con alguno de nuestros proyectos.
martes, 16 de octubre de 2012
El nuevo iPod touch para el 23 de Octubre

Ya se que el 23 de Octubre no se sabe que va a presentar Apple en su evento especial, pero todos aseguran que saldrá el nuevo iPad mini.

Sea lo que sea que se presente no dejará de ser un iPod touch tuneado. Hace tiempo que Apple no innova, que clona el mismo dispositivo con pequeños retoques (algunos copiados de la competencia y mejorados, otros propios pero sin llegar a ser radicales), pero el mercado con su borreguismo habitual no hace mas que bailarle el agua. Ayer mismo escuche en la radio a un "guru" hablando de como la empresa de la manzana había vuelvo a deslumbrar al mundo con el mejor móvil de la historia y dispositivo más avanzado del momento, el iphone 5, cuando precisamente cualquier hijo de vecino sabe que el iphone 5 ha sido la decepción más grande en tiempo (los hay que prefieren incluso el 4S al 5 porque el salto técnologico es mínimo y el precio es más ajustado).
Esta sequía de ideas no viene desde la muerte de Steve Jobs, es algo que viene desde la época del primer iphone. El primer iphone fue un producto impresionante y revolucionario pero a estas alturas esta más que superado y solo saben estirar el chicle, lo mejor del asunto es que el chicle no se les rompe.

Retina display, pantalla más alargada, microsim, nanosim, siri... ¿alguna de estas cosas son trascendentales? El retina display parece el más revolucionario de esta lista, y realmente nadie puede decir que es radical porque con esas dimensiones de pantalla y la concentración de pixeles por pulgadas dificilmente a simple vista es apreciable una mejora en la calidad de imagen. Es más, el retina display se ha demostrado no ser para nada una tecnología interesante, al ser aplicada en los MacBook ha recibido mas criticas que otra cosa, porque toda la vida de la informática ha estado orientada al pixel y en eso se basan muchas técnicas de mejora de imagen (tanto hardware como software)
El 23 de Octubre veremos el ipod touch en una pantalla de 7", tendencia que desde hace unos años esta ganando adeptos, porque se esta demostrando que es el tamaño perfecto para un tablet. Las 7" permite usar el aparato sujetandolo con una mano sin tener que apoyarlo, escribir con los pulgares en la pantalla virtual mientras lo sujetas sin que las teclas del centro de la pantalla queden lejanas, y el tamaño de la pantalla es ideal para guardarlo en cualquier bolsillo, permitir resoluciones muy respetables (mas sabiendo que en 5" ya se meten 1080p) ver con claridad una pelicula o pagina web sin dejarse la vista...
El precio, por fin Apple se ha dado cuenta que hay que vender tecnologia "barata" para extenderse en todos los sectores. Los 250 euros que se han visto en algunos listados de tiendas importantes, lo ponen a la altura del Nexus 7 de google (mejor aparato a mi ver que el iPad mini y lo digo sin que se sepa aun ni como sera el nuevo dispositivo que se presenta dentro de unos dias), aunque auguro que su interior no tendra ningun quadcore, ni tendra 2GB de RAM...

Apple llega tarde, con un SO que debe tener un lavado de cara porque su interfaz esta quedando obsoleta frente a Windows Phone o el giro que esta dando Google a Android, pero triunfara. Si venderan tantos iPad mini, que para navidad NADIE podra comprar uno por la falta de existencias.
Larga vida al ipod touch ya sea convertido en móvil, tablet, formato nano o en, estado natural, mientras algunos esperamos a que Apple vuelva a ser lo que fue llevando las riendas de la innovación.
domingo, 14 de octubre de 2012
Elección de un RSF (Middleware para robots) adecuado.
Voy a tratar de enlazar lo antes posible el asunto de los middleware de robots, porque mi intención es comenzar un pequeño tutorial para todo aquel que desee hacer sus experimentos.
Lo primero que hay que tener claro es el tipo de entorno en el que vamos a desarrollar los experimentos, los requisitos de nuestro experimento (osea lo que vienen siendo requisitos no funcionales en ingeniería del software), y el hardware del que disponemos (requisitos no funcionales). De estos factores se desprenderá la dificultad del conjunto y las características a las que deberá cumplir el RSF.
Existen muchos artículos de investigación que hacen una recopilación de los middleware mas extendidos y sus características, con lo que consultándolos se podría hacer una aproximación a la elección.
Ref:
- PabloIñigo-Blasco, Fernando Diaz-del-Rio, Mª Carmen Romero-Ternero, Daniel Cagigas-Muñiz, Saturnino Vicente-Diaz, "Robotics software frameworks for multi-agent robotic systems development", Robotics and Autonomous Systems 60(2012).
- Ayssam Elkady y Tarek Sobh, "Robotics Middleware: A Comprehensive Literature Survey and Attribute-Based Bibliography", Journal of Robotics Volume 2012, Article ID 959013, Enero 2012.
- Nader Mohamed, Jameela Al-Jaroodi y Imad Jawhar, "Middleware for Robotics: A Survey", (RAM 2008), Septiembre 2008.
Bien, pondré un supuesto con el cual se hará la elección.
En principio plantearemos un entorno controlado como el interior de una casa o un patio, donde cualquiera puede hacer sus pinitos en robótica avanzada. Además asumiré que el experimento será un éxito con tan solo mover el robot y obtener una posición. Y por último, el hardware que se usará es un turtlebot.
Dados estos requisitos, parece obvio que lo mejor es usar ROS, ya que Willow Garage es el desarrollador de este robot y a estas alturas se trata del RSF más extendido y con más futuro. El problema es la gran capacidad de disco que requiere, la falta de versión para programar en otros leguajes de programación que no sean C++, y la total imposibilidad de instalarlo en otros sistemas que no sean Unix like.
Para un experimento de pocas pretensiones, muy versátil, accesible a todo el mundo (no necesario saber de GNU/Linux) y con posibilidad de hacer todo tipo de simulaciones antes de llevar el software al robot, mi elección es la de Player/Stage. El uso de Player/Stage nos permite abaratar más el robot, y podríamos ahorrarnos el poner una Kinect e incluso usar el ipaq como equipo de computo (bueno esto es por frikismo de mi parte)
Bien, Player/Stage es un robotics software framework cuya comunicación se realiza entre el cliente y el servidor de los datos por TCP. Este es uno de los aspectos más débiles del middleware, pero dado que el software cliente estará funcionando en una red local o incluso dentro del mismo turtlebot, y no habrá un flujo de datos abrumador, no tiene mucho sentido preocuparse por este aspecto. Lo mas interesante, además de la multiplataforma, es su plena integración con el simulador Stage.
Stage simula las lecturas de datos de los sensores y componentes con los que se conforme el robot, por lo que el algoritmo que queramos probar en el software cliente de nuestro turtlebot podrá ser probado en simulación. Esto ayuda a la depuración y mejora antes de pasar a la acción real, la detección de fallos es esencial, pero también podremos inducir a ellos introduciendo ruido aleatorio en las lecturas para ver que tal se comporta.
Player provee de los datos al clientes mediante unos proxies, que a su vez están conectados a los drivers del hardware de forma que hacen de capa de abstracción para facilitar la vida al desarrollador. Estos drivers a su vez están conectados a Stage que sustituirá al hardware cuando se simule.
Esquemas del funcionamiento.

Esquema de Player-Hardware

Esquema Player/Stage
Recopilamos el porque he dedidido usar Player/Stage:
-Muy extendido, por lo que tiene una comunidad de usuarios amplia que puede ayudar.
-Ocupa poco en disco.
-Programación en varios lenguajes.
-Portado a distintos SO.
-Simulador integrado de serie.
-Soporte para Kinect, y para el Roomba de iRobot.
-Facil configuración.
En contra se puede decir que la instalación no es muy simple, ya que ofrece problemas de compatibilidad con librerías, y el tipo de comunicaciones.
Turtlebot, o robots basados en Roomba
En este artículo quiero hablar de robots diseñados en base los modernos robots aspiradora (en realidad de 3 modelos concretos). Estoy agrupando todos bajo el nombre de turtlebots, pero es un error que voy a permitirme porque quiero que todo el mundo sepa a que me refiero.
El turtlebot es el robot de investigación y experimentación más sencillo y económico disponible en el mercado. Se trata de OpenHardware desarrollado por Willow Garage (desarrolladores del middleware para robots ROS) por lo que no necesariamente hay que comprar el aparato sino que se lo puede construir cada uno en su casa. Frente a opciones como las plataformas robóticas de MobileRobotics, se desmarca como la opción más recomendable para macroproyectos de cientos de agentes o para microproyectos de un único agente pese a que su autonomía, versatilidad y capacidad de carga son mínimas en comparación con un Pioneer.

Este robot puede simplificarse más debido a que en realidad se esta haciendo la customización del robot comercial Roomba de iRobot. Esta aspiradora dispone de un puerto serie accesible por donde provee de bastante información útil (con la ayuda de un pequeño circuito) como nivel de batería u odometría (muy importante).
Evidentemente, la plataforma requiere de hardware adicional como es una unidad de procesamiento donde ejecutar un middleware y ejecutar los algoritmos que queramos probar. La elección de Willow Garage fue la de usar un netbook, pero no necesariamente tiene porque ser este equipo, podemos usar tanto una rasberry pi, como un PC 104, una PDA antigua... cualquier cosa que al menos pueda ejecutar Linux. Hay otras opciones por internet paralelas y muy válidas usando la aspiradora.
La versión que más me gusta es la que usa una viejisima iPaq.

Si queremos seguir los pasos del turtlebot original es necesario instalar una Microsoft Kinect, accesorio de videoconsola que se ha convertido en la investigación como un elemento esencial por ser el sustituto perfecto de tres sensores habituales como son cámara, IMU y laser. Para que os hagáis una idea, el laser más barato del mercado no baja de los 2000 euros (aunque evidentemente no es comparable con el Kinect en precisión y alcance).
Existe una última versión (que yo conozca) de estos turtlebot, y se trata del llamado bilibot que es el último en aparecer y el más caro al estar equipado con un brazo.

El cálculo es que con poco más de 400 euros tendréis vuestro turtlebot construido (reutilizando un poco de hardware y comprando algunos componentes de segunda mano)
miércoles, 10 de octubre de 2012
LG, los moviles y Optimus 2x P990

Bien, quería hacer una pequeña visión sobre el mundo de los móviles y el problema de la marca LG. Esta empresa, lleva mucho tiempo haciendo móviles con poco éxito a excepción del "LG chocolate" mítico. El problema que tienen los coreanos es poco comprensible, ya que desde siempre han sido punteros en tecnología y van por delante de todos sus competidores.
Fueron los primeros en sacar un móvil de doble núcleo, con lo que consiguieron el smartphone más rápido de la historia y a un coste bastante ajustado; los primeros en sacar un terminal con tecnología 3D, los primeros en usar el dual channel para memoría RAM... ahora con el Optimus G tendrán el mejor móvil del mercado pero... ¿Por qué incorporando la mejor tecnología a un precio super competente, no consiguen el beneplácito del mercado? La respuesta es sencilla, mala experiencia de usuario.

LG se ha caracterizado en la época de la explosión de los smartphone, por no optimizar las ROMs de forma que muchos sufren cuelgues, reinicios o perdidas de cobertura intermitentes. Esto unido a su falta de soporte por parte de LG que no da ninguna continuidad actualizando los Androids (referente a nuevas versiones del SO), hacen que el usuario final tenga una sensación de mala calidad en sus productos. Si unimos esto al boca a boca de los foros, la sangría de posibles clientes es muy importante. LG podría ocupar el puesto que ocupa Samsung sin ningún tipo de problemas, pero una mala planificación la llevan al fracaso tras fracaso (no absoluto pero si conforme a espectativas que levantaban).
Es significativo ver que cuando tienes un móvil LG, si le cambias la ROMs de serie por una cocinada, obtienes una mejora importante y se eliminan casi el 100% de los problemas (obviando los propios de la ROM no oficial que siempre los hay).
Ahora pasaré a hacer una review de un LG Optimus 2X P990 para que entendáis lo que quiero decir:
Características:
-Tegra 2 1GHz
-512MB de RAM
-Salida HDMI
-cornning gorilla glass
-Pantalla Super LCD IPS
-Resolucion 800x480 en pantalla de 4"
-Lector de tarjetas micro SD
-Almacenamiento interno de 8 GB
-Wifi, GPS y A-GPS, bluetooth
-Cámara de 8Mpx
-Grabación de video HD 720 y 1080p
-Conector de sonido standar jack 3,5mm
-Bateria de 1500mAh
Todo esto en un movil de principios del 2011!!! cuando cualquiera diria que es propio de hoy en dia.
En mi opinión los acabados son perfectos (metálicos en algunas zonas como el borde del terminal y tapa trasera), muestran gran calidad y robustez, cosa que no pasa con muchas marcas. Pero siempre recomiendo, tener el móvil en las manos. NO HAY QUE FIARSE NUNCA, DE LAS APRECIACIONES DE LA GENTE!!! Casi todos las review que se pueden leer están sesgadas hacia un modelo concreto, y las comparativas serias nunca hablan de aspectos subjetivos, por lo que siempre es mejor tener el móvil en mano y evaluar por ti mismo. Lo que a uno le parece grande y pesado, a otro le parece justo para el tamaño de su bolsillo.
Para que sepáis mis predilecciones, y entendáis mis apreciaciones informo:
-Me gustan los teclados físicos.
-Si no existe teclado físico veo esencial tener una pantalla de al menos 4,3" en adelante, sin llegar a las 5" o a lo sumo rozándolo.
-Es importante tener una cámara no de muchos MPx sino de alta calidad y buena optica, si ambas cosas se juntan mejor.
-Duración de la batería es vital.
-La calidad de los materiales y acabados es algo primordial.
Partiendo de esto, tras un tiempo usando el movil he comprobado que tiene una de las mejores cámaras de móvil que conozco, la batería no dura como una blackberry o un nokia symbian, pero frente a otros Androids es aceptable teniendo el 3G activo (osea 32 horas no más, sin uso intensivo evidentemente). El GPS es MAGNIFICO, no había usado un móvil cuyo GPS cogiera antes señal de satélites que este. Las pegas, el software como ya he mencionado (aunque la ROM de serie esta super preparada y equipada con software útil, con una capa de personalización que me encanta bien organizada, donde las aplicaciones instaladas se distinguen de las que vienen de serie y las nunca abiertas se marcan con una N sobre el icono), la pantalla es pequeña aunque ya os imaginareis que esta próximo a los iphone por las 4".
¿Porque hablar de todo esto ahora?
Parece ser, que por una vez no soy el único que piensa en contra corriente de la amplia comunidad de usuarios de tecnología. Google también ha creido en LG, y se ha dado cuenta de los equipazos que preparan lo Koreanos, por lo que se esta especulando que el próximo "teléfono google" oficial, osea el nuevo NEXUS será un LG basado en el nuevo Optimus G. Esto quiere decir que el problema de software se desvanecerá, y se convertirá en el móvil de referencia SIN DUDA ALGUNA.
Recomendación, ponga un móvil LG en su vida, uno de segunda mano de algún usuario de algún foro que este cansado de tantos fallos, y metale una ROM cocinada. El acierto esta garantizado, precio regalado y hardware perfecto. (Antes de la compra, comprobar las ROMs cocinadas disponibles, para evitar sorpresas)
-Duración de la batería es vital.
-La calidad de los materiales y acabados es algo primordial.
Partiendo de esto, tras un tiempo usando el movil he comprobado que tiene una de las mejores cámaras de móvil que conozco, la batería no dura como una blackberry o un nokia symbian, pero frente a otros Androids es aceptable teniendo el 3G activo (osea 32 horas no más, sin uso intensivo evidentemente). El GPS es MAGNIFICO, no había usado un móvil cuyo GPS cogiera antes señal de satélites que este. Las pegas, el software como ya he mencionado (aunque la ROM de serie esta super preparada y equipada con software útil, con una capa de personalización que me encanta bien organizada, donde las aplicaciones instaladas se distinguen de las que vienen de serie y las nunca abiertas se marcan con una N sobre el icono), la pantalla es pequeña aunque ya os imaginareis que esta próximo a los iphone por las 4".
¿Porque hablar de todo esto ahora?
Parece ser, que por una vez no soy el único que piensa en contra corriente de la amplia comunidad de usuarios de tecnología. Google también ha creido en LG, y se ha dado cuenta de los equipazos que preparan lo Koreanos, por lo que se esta especulando que el próximo "teléfono google" oficial, osea el nuevo NEXUS será un LG basado en el nuevo Optimus G. Esto quiere decir que el problema de software se desvanecerá, y se convertirá en el móvil de referencia SIN DUDA ALGUNA.
Recomendación, ponga un móvil LG en su vida, uno de segunda mano de algún usuario de algún foro que este cansado de tantos fallos, y metale una ROM cocinada. El acierto esta garantizado, precio regalado y hardware perfecto. (Antes de la compra, comprobar las ROMs cocinadas disponibles, para evitar sorpresas)
domingo, 30 de septiembre de 2012
RSF o Middleware para Robots
Una vez más creo oportuno hacer un break en mis entrada de opinión para ponerme un poco técnico y tratar de ayudar a los que sean curiosos o tengan problemas en sus proyectos. Esta vez voy a hacer una pequeña introducción a la robótica.
La robótica a gran escala, me refiero a sistemas con hardware de gran envergadura y no a los robots BEAM u otro tipo de robots simples (que no por ello son menos importantes), requiere de dispositivos cuyo manejo necesita de un software complejo. Por ejemplo, cuando se quiere usar un laser como es comprensible el acceso a los datos que provee este aparato, no es lo mismo que usar un sensor de proximidad de infrarojos o un sensor de ultrasonidos que pueden ser manejados por un simple PIC. De estas necesidades software se derivan muchas otras necesidades como: un sistema de computo potente (ordenador, pc104, placas con procesadores ARM potentes...), un conocimiento mucho más en profundidad del hardware, etc.
De esta problemática surgieron programas gigantes y nada reutilizables, para el control de un robot y de todos los dispositivos que lo componían. Por lo que si se construía un nuevo robot con componentes similares al anterior, no era posible reutilizar ni tan solo el software de esos componentes (salvo un buen diseño software). Gracias a Dios, entre los miembros de esta comunidad de investigadores habían muchos licenciados en computer science engineering (aka ingenierios informáticos) y se dio con una solución bastante potente para el problema. Esta solución es el middleware para robots o RSF de las siglas Robotics Software Framework.
¿Cual es la utilidad de un RSF? Bien, se trata de una capa de abstracción software que sirve para que el programador se despreocupe de la implementación específica de un hardware y de todos sus detalles como drivers o APIs del fabricante. De esta forma se normaliza la programación para robots, y permite por ejemplo usar un laser dando igual la marca o modelo que sea, siempre que este tenga soporte dentro del middleware para robots.
Ahora viene lo mejor, esos componentes hardware concretos tienen sus correspondientes módulos/componentes software genéricos que homogeinizan el hardware, pero tienen que estar corriendo en un servidor al cual se conecta el software desarrollado por el usuario del robot. Bien, esto quiere decir que debe existir alguna forma de comunicarse con esos módulos para poder obtener información y controlarlo. Lo habitual, contra todo pronóstico, es que esa comunicación se realice mediante la pila de protocolos de red, haciendo uso de TCP/UDP. ¿Por qué esto? para dar más flexibilidad de la que da el propio diseño modular, distribuir los componentes de un robot, permite la construcción de un sistema robótico mas complejo aún y por tanto más potente aunque a costa de problemas derivados de la comunicación.
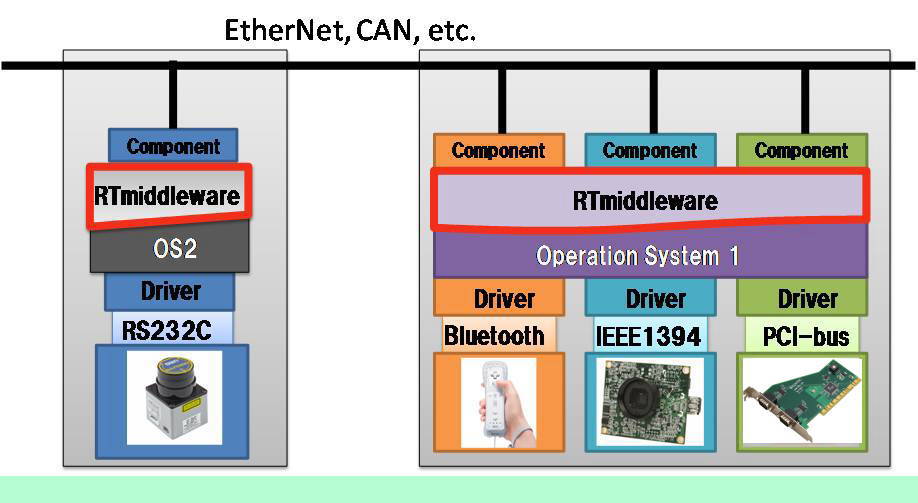
Para que se entienda mejor el funcionamiento, pongo una imagen de un middleware comercial.

Los middleware más extendidos son Open source y por eso mismo son los más recomendables (si se encuentra un bug, se puede modificar, son los más extendidos por lo tanto son los que tienen mayor número de componentes..). Pero también a la hora de hacer la elección del RSF que se quiere usar en el robot, debería ser un factor muy importante la existencia de un software de simulación.
El software de simulación con normalidad se integra perfectamente con el RSF, consiguiendo que el desarrollador no necesite tener el hardware real para programar la aplicación que maneja el robot. Además, no solo simula el hardware sino también un entorno, pudiendo representar casi de forma fidedigna la respuesta del aparato en un entorno real.
Una pequeña recopilación de los RSF:
-ROS
-Player/Stage
-Miro
-UPnP
-ORCA
-Urbi
-OpenRDK
-OROCOS
domingo, 23 de septiembre de 2012
Retro review SONY VAIO P11Z


Hace poco que me he hecho con este subnotebook y a petición de un compañero de foro voy a hacer esta pequeña review.
El Sony VAIO P11Z es un netbook interesante por la cantidad de hardware extra que equipa y por su tamaño, más que por otra cosa. Su rendimiento es bastante escaso si lo comparamos con un netbook actual, ya que si se tiene en cuenta que tiene un procesador Atom 520z o 540z en las versiones más potentes (1,8GHz) ya podeis imaginaros que puede tener problemas para mover incluso algunos juegos web hechos en flash (por ejemplo el settlers online del que ya hice una review). No quiere decir que sea pésimo, sino que su procesador es la primera generación de Atom y además en la gama de bajo consumo, sin contar el chip gráfico que aunque es "moderno" es una intel GMA500 (que viene siendo la GPU prima hermana que la de algunos móviles actuales, osea un derivado de PowerVR)
Como ventajas, ese procesador y GPU hacen que tenga un consumo reducido, pero se da el caso de tener una batería de muy escasa capacidad para también ahorrar en espacio, por lo que solo tiene 2 horas de autonomía. Yo tengo la batería de alta capacidad y me dura 4 horas aproximadamente con la wifi activa, pero hace que el portátil pese mucho mas (lo digo en relación al peso del portatil).
También se trata de un netbook muy pequeño (no tanto como los viliv pero por el estilo) con una pantalla de resolución brutal 1600 x 768 y un peso de unos 600 gramos. El teclado es muy cómodo para el tamaño que tiene, algo que no se cumple en equipos como el Jornada 720 (se que no es un netbook pero tiene teclado completo que supuestamente se puede usar con las dos manos), los viliv o Kohjinsha (que son mi debilidad pero la cordura no me deja comprarlos).
El hardware adicional que lo convierten en un must have, es el GPS,el modem 3G y la pantalla de excelente resolución. Es cierto que hace que la duración de la bateria baje, pero te dan una flexibilidad brutal para alguien que este continuamente viajando. El otro punto débil es la pésima cámara, pero es suficiente para lo poco que se suelen usar (personalmente no la uso nunca así que paso)
¿Que ocurre con el software? Todos los drivers están disponibles para windows vista, pero no me extrañaría para nada que en windows 7 sean compatibles (normalmente los drivers para Vista funcionan sin problemas en 7 al igual que lo hacian en XP los del 2000). Un SO que no he probado y que a priori parece que sera compatible, es con Android X86 que actualmente ya esta en la version ICS. También existe un software de downgrade ofertado por la propia SONY que descarga todo lo necesario para que el Vaio P11Z funcione al 100% en XP.
En cuanto a Windows 8, lo he usado con bastante satisfacción (en la entrada que hago la comparativa con Windows XP podreis leer mas al respecto). Me ha asombrado ver como se mueve mejor con la nueva versión del SO de Microsoft que con las anteriores, pero he recibido quejas sobre el mal funcionamiento del GPS. Dudo mucho que sea tan malo como lo era el del Toshiba Libretto W105 (que carecía de antena conectada al modulo). Lo recomiendo totalmente, si tienes la intención de usar uno de estos para trabajo. Piensa que cuesta cerca de 300 euros (completo y perfectas condiciones) de segunda mano un equipo que es del 2009 y con hardware que podemos asumir que esta desfasado en comparación con otros equipos del mismo precio. Osea, es un equipo muy valorado.
En cuanto a Windows 8, lo he usado con bastante satisfacción (en la entrada que hago la comparativa con Windows XP podreis leer mas al respecto). Me ha asombrado ver como se mueve mejor con la nueva versión del SO de Microsoft que con las anteriores, pero he recibido quejas sobre el mal funcionamiento del GPS. Dudo mucho que sea tan malo como lo era el del Toshiba Libretto W105 (que carecía de antena conectada al modulo). Lo recomiendo totalmente, si tienes la intención de usar uno de estos para trabajo. Piensa que cuesta cerca de 300 euros (completo y perfectas condiciones) de segunda mano un equipo que es del 2009 y con hardware que podemos asumir que esta desfasado en comparación con otros equipos del mismo precio. Osea, es un equipo muy valorado.
En resumen, comparándolo con mi último subnotebook, el Toshiba Libretto W105, tiene un rendimiento ridículo pero su grosor es menor aunque es mas largo. Dándole una puntuación en dimensiones tiene un 7/10 pero en hardware un 4/10 frente al Libretto al que le daría un 9/10. Estamos hablando de equipos de fechas de salida muy próximas. El consumo, el calor disipado, y el teclado físico me hacen afirmar que el VAIO es más apropiado para el trabajo y me durara más tiempo que mi añorado W105 pero solo haciendo uso de la batería de capacidad extendida que se puede adquirir en ebay por 56 euros.
miércoles, 8 de agosto de 2012
Los PowerPC vuelven a estar de moda

Los procesadores de Motorola e IBM de arquitectura RISC, están volviendo a estar en la cúspide de la tecnología. ¿Cómo es esto? Yo digo: ¿acaso alguna vez no lo estuvieron?
Apple abandono estos maravillosos procesadores en favor de los raquíticos intel, esgrimiendo motivos comerciales de abaratamiento de costes y mejoras de rendimiento sobretodo en el apartado de portátiles. Personalmente nunca me he creído esta versión, mas aun sabiendo los planes de IBM con procesadores de varios nucleos y bajo consumo antes de que intel pensara tener alguno en el mercado.
¿Por qué afirmo que ahora los PowerPC están de moda? Pues bien, se han dado las casualidades de que actualmente todo los aparatos que simbolizan el TOP de tecnología (y digo TOP REAL) tiene como protagonista un procesador de este tipo.
El Curiosity rover, esa sonda que acaba de aterrizar en Marte y que tiene como misión buscar vida, esta planeado que tenga 2 años de vida útil, pero puede alargarse hasta los 14!!! ¿Pero que pinta aquí la NASA? Pues pinta y mucho, el procesador encargado de llevar estas tareas a cabo es un RAD750, procesador basado en el PowerPC 750 a 200MHz (osea un G3 de toda la vida modificado para bajo consumo y soportar radiaciones) Se podría decir que el procesador es el de la Game Cube o la Wii. Aquí lo que cuenta es consumo potencia, y FLOPS que se pueden desarrollar, por lo que se ve evidente que si la NASA toma esta elección es porque se ha probado que son en estos ratios la mejor poción posible. PowerPC 1 - Apple 0
Siguiendo con esto, podría centrarme en que todas las consolas contemporáneas (Wii, Xbox 360, PS3) poseen un PowerPC en su corazón, de mas o menos núcleos, y a mayor o menor frecuencia. Queda claro el motivo de la elección en unos sistemas que su duración siempre se planea para al menos 5 años sin llegar a la plena obsolescencia. PowerPC 2 - Apple 0
Lo mejor, todos sabemos que el TOP500 es el ranking de los superordenadores mas potentes actuales, y que muchas veces han estado encabezados por equipos con procesadores vectoriales (los cuales requieren de una adaptación en el software a ejecutar) pero habitualmente, y concretamente ahora, esta encabezado por Sequoia http://i.top500.org/system/177556 que usa procesadores IBM Power BQC (variantes una vez mas de la familia de los PowerPC A2 multinucleos de reducido consumo) PowerPC 3 - Apple 0
Para finalizar, esta noticia: http://es.engadget.com/2012/08/04/ibm-alcanza-los-5-5-ghz-con-los-chips-system-z-y-anuncia-power7/ Power 7+ la nueva familia de la que nacerán los próximo PowerPC. Actualmente los Power7 son los procesadores de mayor velocidad del mundo con 4,4GHz SIN FORZAR EL CHIP CON TECNICAS DE OVERCLOCK (muchos podrían decir que AMD lo consiguió hace poco, pero no era así, no hablamos del mismo planteamiento) PowerPC 4 - Apple 0
Por mi parte, creo que poco hay que añadir. Aunque es cierto que Apple mejoro en difusión, no ha sido el caso de la mejora en rendimiento, ni el caso del abaratamiento de costes (siguen siendo equipos mas caros que la competencia solo justificados por el diseño). PowerPC son la crema de los procesadores de propósito general, y por ello no pienso renunciar a mis 2 PowerMac G5 Dual cores.
Suscribirse a:
Entradas (Atom)